
خانه » مجله تخصصی خودروهای فونیکس و ام وی ام » تفاوت کروز کنترل تطبیقی با سیستمهای رانندگی خودران
گیتی هومانفر
تفاوت کروز کنترل تطبیقی با سیستمهای رانندگی خودران
با پیشرفت فناوریهای نوین در صنعت خودرو، سامانههای هوشمند مختلفی برای افزایش ایمنی، راحتی و بهرهوری در رانندگی توسعه یافتهاند. از جمله این سامانهها میتوان به کروز کنترل تطبیقی (Adaptive Cruise Control) و سیستمهای رانندگی خودران (Autonomous Driving Systems) اشاره کرد. هرچند هر دو به منظور کاهش نیاز به دخالت انسانی طراحی شدهاند، اما تفاوتهای عمدهای در عملکرد، سطح خودمختاری و قابلیتهای فنی آنها وجود دارد. در این مقاله به بررسی دقیق تفاوتهای میان این دو سیستم پرداخته میشود.
با اتو مگ همراه باشید
تعریف کروز کنترل تطبیقی
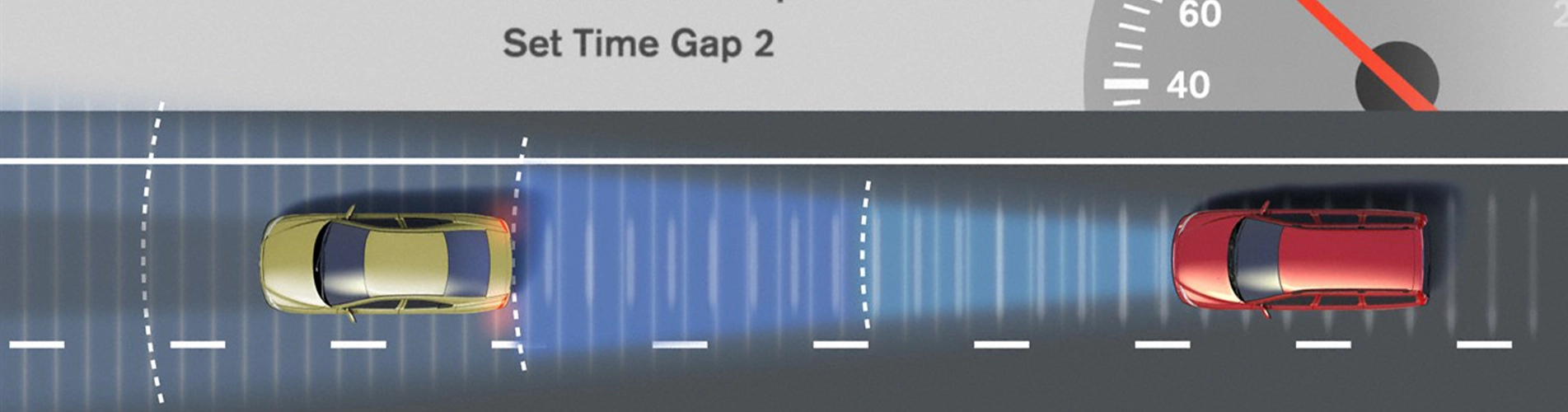
کروز کنترل تطبیقی نسخهای پیشرفتهتر از کروز کنترل معمولی است. این سیستم علاوه بر حفظ سرعت ثابت، میتواند فاصلهای ایمن با خودروی جلویی را نیز حفظ کند. با استفاده از حسگرهایی مانند رادار و دوربین، کروز کنترل تطبیقی میتواند سرعت خودرو را در صورت نزدیک شدن به وسیلهای در جلو کاهش دهد و پس از رفع مانع یا افزایش فاصله، به سرعت از پیش تعیینشده بازگردد.
ویژگیهای اصلی کروز کنترل تطبیقی:
- تنظیم خودکار سرعت بر اساس ترافیک
- حفظ فاصله ایمن با خودروی جلو
- توقف و حرکت دوباره در ترافیکهای سنگین (در برخی مدلها)
- کاهش خستگی راننده در مسیرهای طولانی

تعریف سیستمهای رانندگی خودران
سیستمهای رانندگی خودران یک گام فراتر از کروز کنترل تطبیقی هستند. این فناوریها تلاش میکنند تا خودرو بدون نیاز به دخالت راننده، عملیات رانندگی را به طور کامل انجام دهند. بسته به سطح خودران بودن (از سطح صفر تا پنج)، میزان دخالت انسانی در رانندگی میتواند از بسیار زیاد تا کاملاً صفر متغیر باشد.
ویژگیهای اصلی سیستمهای خودران:
- شناسایی تابلوها و علائم رانندگی
- تغییر مسیر خودکار
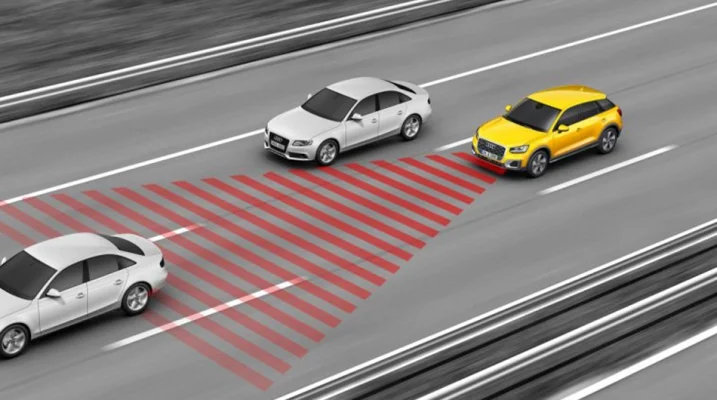
- تشخیص عابر پیاده و موانع
- تصمیمگیری در تقاطعها و شرایط پیچیده
- پارک خودکار و خروج از پارک
تفاوتهای کلیدی بین این دو سیستم
1. سطح خودمختاری
کروز کنترل تطبیقی عموماً در سطح ۱ یا ۲ از پنج سطح خودران قرار میگیرد. این به این معناست که سیستم تنها وظیفه خاصی (مانند کنترل سرعت یا فاصله) را انجام میدهد، اما همچنان نیاز به نظارت و دخالت دائمی راننده دارد.
در مقابل، سیستمهای خودران سطوح ۳ تا ۵ را هدف قرار میدهند که در آنها خودرو میتواند بدون دخالت راننده در بسیاری از شرایط حرکت کند. در سطح ۵، راننده اصلاً نیازی به حضور ندارد.
2. میزان وابستگی به راننده
کروز کنترل تطبیقی تنها یک دستیار رانندگی است و در تمام مدت باید راننده در حالت آمادهباش قرار داشته باشد. این سیستم نمیتواند تصمیمات پیچیده مانند تعویض خط یا توقف در تقاطعها را به تنهایی بگیرد. اما سیستمهای خودران، مخصوصاً از سطح ۳ به بالا، میتوانند بخش عمدهای از تصمیمگیریهای رانندگی را بر عهده بگیرند. این سامانهها دارای تواناییهای درک محیطی، پردازش دادههای پیچیده و تصمیمگیری مستقل هستند.
3. نوع سنسورها و پردازش اطلاعات
در کروز کنترل تطبیقی معمولاً از رادار و گاهی دوربین جلو استفاده میشود. اما در خودروهای خودران، مجموعهای از حسگرهای پیچیدهتر شامل لیدار (LiDAR)، دوربینهای چندجهته، GPS دقیق و واحدهای پردازش هوشمند مورد استفاده قرار میگیرد.
4. کاربرد در شرایط رانندگی پیچیده
کروز کنترل تطبیقی بیشتر در بزرگراهها و جادههای مستقیم کاربرد دارد. در حالی که خودروهای خودران میتوانند در شرایط پیچیده شهری، تقاطعها، و حتی در شرایط آبوهوایی متفاوت فعالیت کنند (بسته به سطح خودران بودن).
مزایا و معایب کروز کنترل تطبیقی
مزایا:
کروز کنترل تطبیقی نسبت به سایر فناوریهای پیشرفته رانندگی، هزینه پیادهسازی پایینتری دارد و در حال حاضر در بسیاری از خودروهای میانرده نیز قابل دسترس است. این سیستم در مسیرهای مستقیم مانند بزرگراهها عملکرد بسیار خوبی دارد و با تنظیم سرعت و فاصله، رانندگی را راحتتر و ایمنتر میکند. همچنین استفاده از آن بسیار ساده بوده و نیاز به آموزش خاصی ندارد.
معایب:
با وجود مزایای آن، کروز کنترل تطبیقی نمیتواند در شرایط پیچیده رانندگی مانند تقاطعها، خیابانهای شهری یا تغییر ناگهانی وضعیت ترافیکی تصمیمگیری کند. نیاز به حضور و نظارت کامل راننده همیشه وجود دارد و این سیستم نمیتواند به صورت مستقل خودرو را هدایت کند. همچنین فاقد تواناییهایی مانند تشخیص علائم رانندگی یا تعویض خط خودکار است.
مزایا و معایب سیستمهای رانندگی خودران
مزایا:
سیستمهای رانندگی خودران دارای قابلیت تصمیمگیری پیچیده و مستقل هستند. آنها میتوانند در شرایط متنوع ترافیکی، درونشهری و بینشهری عملکرد مناسبی داشته باشند و حتی در برخی سطوح، راننده را کاملاً از مسئولیت رانندگی معاف کنند. این سامانهها به طور بالقوه میتوانند خطاهای انسانی را به حداقل رسانده و ایمنی کلی تردد را افزایش دهند.
معایب:
با وجود پیشرفتهای قابل توجه، این سیستمها همچنان با هزینههای بالا همراه هستند و نیاز به زیرساختهای پیشرفته دارند. همچنین هنوز در بسیاری از کشورها با موانع قانونی، اخلاقی و فنی مواجهاند. محدودیت عملکرد در شرایط آبوهوایی خاص یا مناطق با سیگنال GPS ضعیف نیز از چالشهای آنها محسوب میشود.
نتیجهگیری
هر دو فناوری نقش مهمی در تکامل صنعت خودرو ایفا کردهاند، اما نباید آنها را با یکدیگر اشتباه گرفت. کروز کنترل تطبیقی یک فناوری کمکراننده است که برای راحتی و ایمنی بیشتر طراحی شده، در حالی که سیستمهای رانندگی خودران به دنبال حذف کامل نیاز به راننده هستند. آینده خودروها به سمت اتوماسیون کامل در حرکت است، اما فعلاً، استفاده از سامانههایی مانند کروز کنترل تطبیقی، گامی منطقی و قابل دسترس برای اکثر رانندگان است.



